


Naši Projekti
Jedan od interesantnijih projekata koje smo imali, možete pronaći u nastavku.
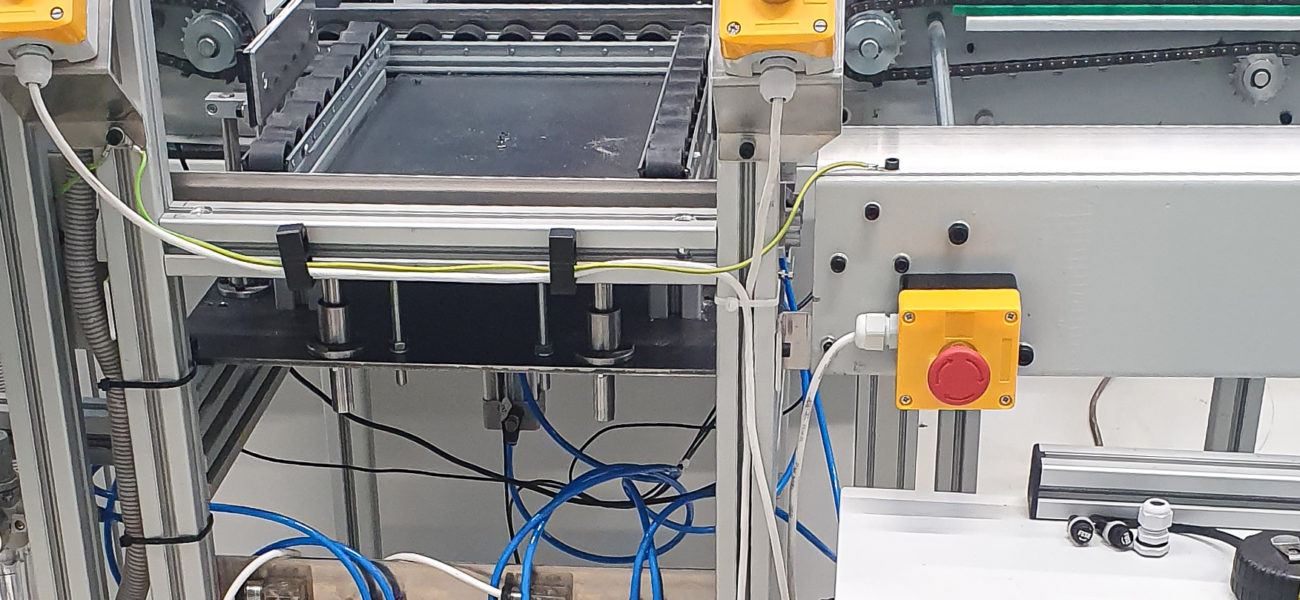
Kiper mašina


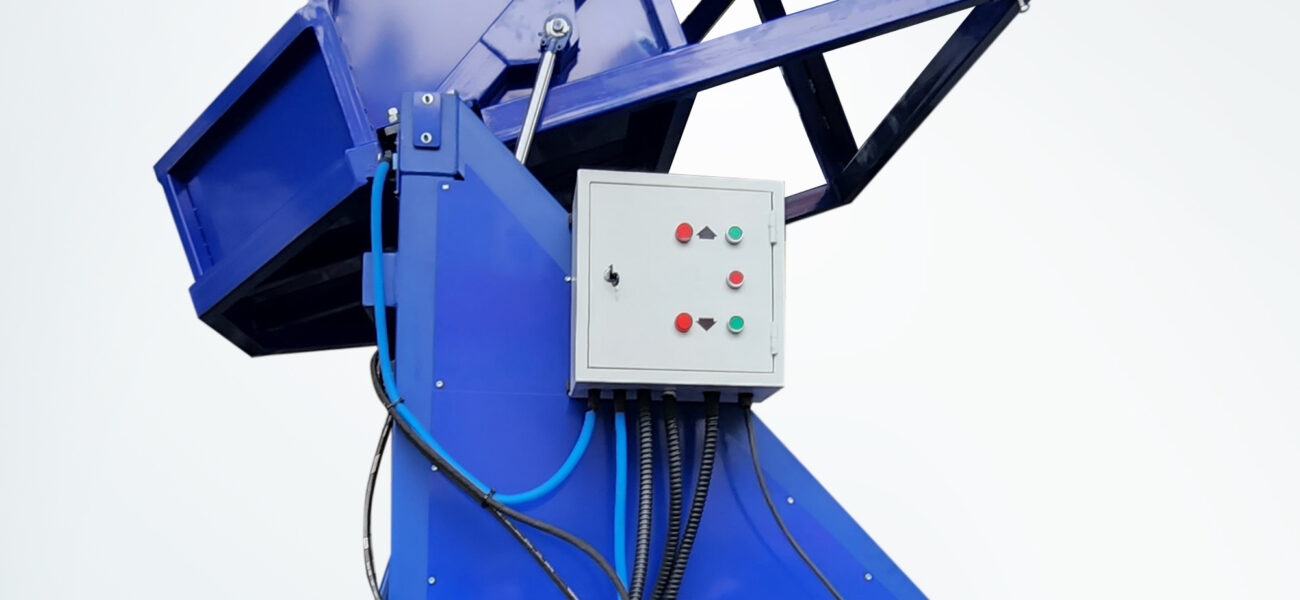

Kiper mašina za presipanje delova iz gitterbox-a.
Zbog velike težine i količine delova u gitterbox-u koje je potrebno prebaciti u drugi gitterbox kako bi delovi otišli u sledeći proces obrade, napravljena je Kiper mašina koja ima zadatak da delove iz jedne kutije prebaci u drugu.
Za ceo proces dovoljan je samo jedan operater. Operater će, pre svega, gitterbox viljuškarom ili paletarom postaviti na poziciju unutar kiper mašine koja se nalazi u početnom, vertikalnom položaju, te će komandom podići kutiju koja će biti u položaju iz kojeg će se delovi presipati. Krajnji položaj je podešen da se zaustavi 2 cm iznad drugog gitterbox-a. Gravitacijom će se delovi iz jedne kutije prebaciti u drugu kutiju.
Upravljanje uređajem se vrši sa komandnog ormana. Na njemu se nalaze tri tastera za pokretanje i zaustavljanje (start/stop). Dva su za pokretanje jednog odnosno drugog smera, dok je jedan za zaustavljanje.
Pogon je hidraulični.
Osnova konstrukcije je robusna šasija, koja služi za prihvat gitterbox-a i smeštaj pogonske grupe. U delu gde se nalazi gitterbox su postavljeni čelični profili kao graničnici kako bi giterbox ostao na istoj poziciji i nakon krajnjeg položaja kiper mašine.
Zbog prisustva dinamičkih sila pri obrtanju, mašina se učvršćuje za podlogu.
Mikser za mešanje tečnosti u buretu od 200 l






Neke tečne materije je pre upotrebe u tehnološkom procesu potrebno promešati.
Jedna vrsta transportne ambalaže na sebi ima otvore sa poklopcima takve veličine, da je kroz njih moguće postaviti neku vrstu mešača i pripremiti sadržaj za upotrebu.
Druga vrsta nema otvore odgovarajuće veličine za prolaz mešača, pa se mešanje sadržaja mora obaviti pokretanjem celog suda.
Po želji naručioca, bilo je potrebno izraditi uređaj koji će mešati sadržaj prevrtanjem zatvorenog suda.
Usvojen je poznati koncept po kome se sud (bure metalno ili plastično) postavlja na blago nagnutu prihvatnu površinu, učvršćuje za nju i aktiviranjem mehanizma počinje mešanje.
Predloženi uređaj omogućava biranje brzine (u dogovorenom opsegu) i dužinu trajanja mešanja.
Osnova konstrukcije je robustna šasija, koja služi za prihvat buradi i smeštaj pogonske grupe.
Pogon je elektromotorni sa reduktorom, koji je lančanim pogonom vezan sa vratilom koje pokreće prihvatnu platformu.
Upravljanje uređajem se vrši sa komandnog ormana. Na njemu se nalaze tasteri za pokretanje i zaustavljanje (start/stop), dugme za izbor brzine prevrtanja, dugme vremenskog tajmera i glavni prekidač.
Početni položaj prihvatne platforme je horizontalni – radi lakog nameštanja buradi – a istovremno je to i krajnji položaj svakog ciklusa. Dužinu ciklusa određujemo izborom vremena rada na tajmeru, ali njega možemo po potrebi prekinuti tasterom stop.
Radi zaštite rukovaoca predviđeno je da se oko mašine postavi zaštitna ograda. Ciklus rada je moguće aktivirati tek nakon što se zatvore vrata zaštitne ograde.
Zbog prisustva dinamičkih sila pri obrtanju, mašina se učvršćuje za podlogu.
Karakteristike uređaja:
Visina bureta: (800-920) mm
Prečnik bureta: (450-600) mm
Brzina obrtanja: (5-20) o/min
Nosivost: do 350 kg
Snaga motora: 1,5 kW/380 V, 2800 o/min
Dimenzije zaštitne ograde: (2250x1350x1600) mm
Mobilna platforma


Ovaj mehanizam je nastao iz potrebe da se uštedi prostor i poboljša rukovanje predmetima u:
- magacinima,
- skladištima
Bilo da se radi o proizvodnim pogonima:
- bibiotekama,
- galerijama,
- biroima za dokumentaciju,
- navedite sami koji god prostor želite
Uštedećete prostor do čak 40%, a uz to neverovatno lako ćete rukovati njime.
Osnovna prednost pokretnih platformi je da se pomoću njih maksimalno iskorišćava postojeći magacinski prostor. Platforme, na kojima se nalaze police ili ormani, su poređane jedna do druge bez međusobnog razmaka i u takvom poretku ispunjavaju prostoriju. Kad se želi pristup bilo kojoj, ostale se pomeraju i omogućavaju da se željenoj priđe sa jedne ili druge strane. Nakon odlaganja ili uzimanja predmeta platforme se vraćaju u položaj zgusnutog poretka.
Plaforma se točkovima kreće po šinama postavljenim na podu.
Pogon može biti ručni ili elektromotorni.
Takođe, moguća je primena računarskog upravljanja u organizaciji rada skladišnog sistema.
U toj naprednoj varijanti korisnik odabere željeni predmet, koji se nalazi negde u skladištu, nakon obrade te informacije platforme se pomeraju na takav način da omoguće pristup predmetu na određenoj platformi – polici.
Platforme se izrađuju za različite nosivosti, različite dimenzije, mogu biti kompletne sa policama ili ormanima, sa ručnim ili motorizovanim pogonom – jednom rečju po zahtevu korisnika.
Linija za transport PCB ploča
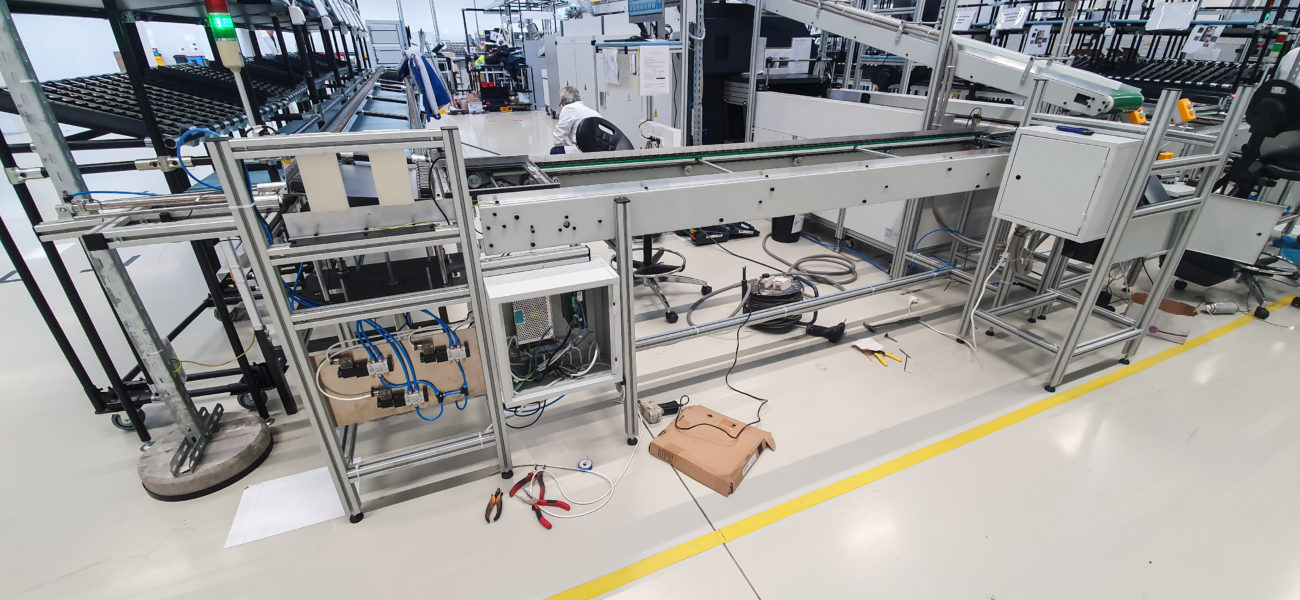


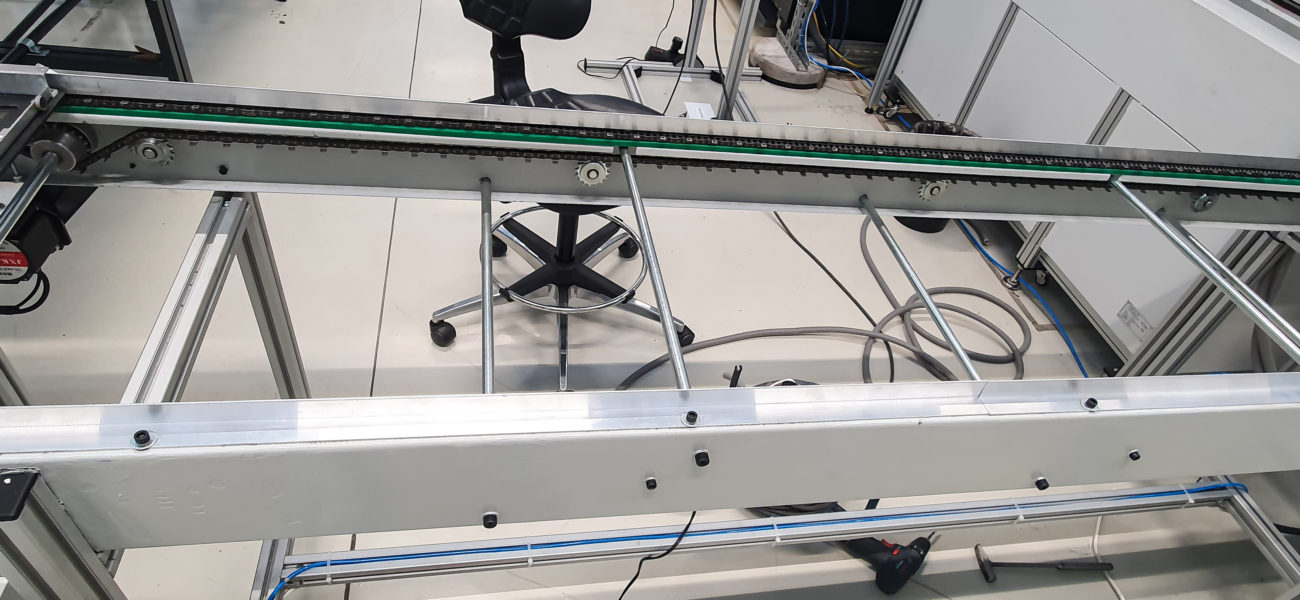






Prema zahtevu kupca, bilo je potrebno napraviti transportnu liniju koja će u što kraćem vremenskom intervalu preneti ram sa napunjenim štampanim pločama od krajnje tačke proizvodne trake do kalajnog kupatila, a u cilju
- ušede vremena u transportu,
- sprečavanje rizika od ispadanja komponenata sa ploče i
- smanjenja broja operatera koji učestvuju u samom transportu.
Da bi se to ostvarilo, konstruisano je i proizvedeno nekoliko funkcionalnih celina, koje međusobno povezane čine liniju za transport napunjenih štampanih ploča.
Linija se sastoji od prihvatne stanice i lančanih transportera čiji je zadatak prenošenje ramova sa napunjenim štampanim pločama.
Linija istovremeno opslužuje dve proizvodne trake.
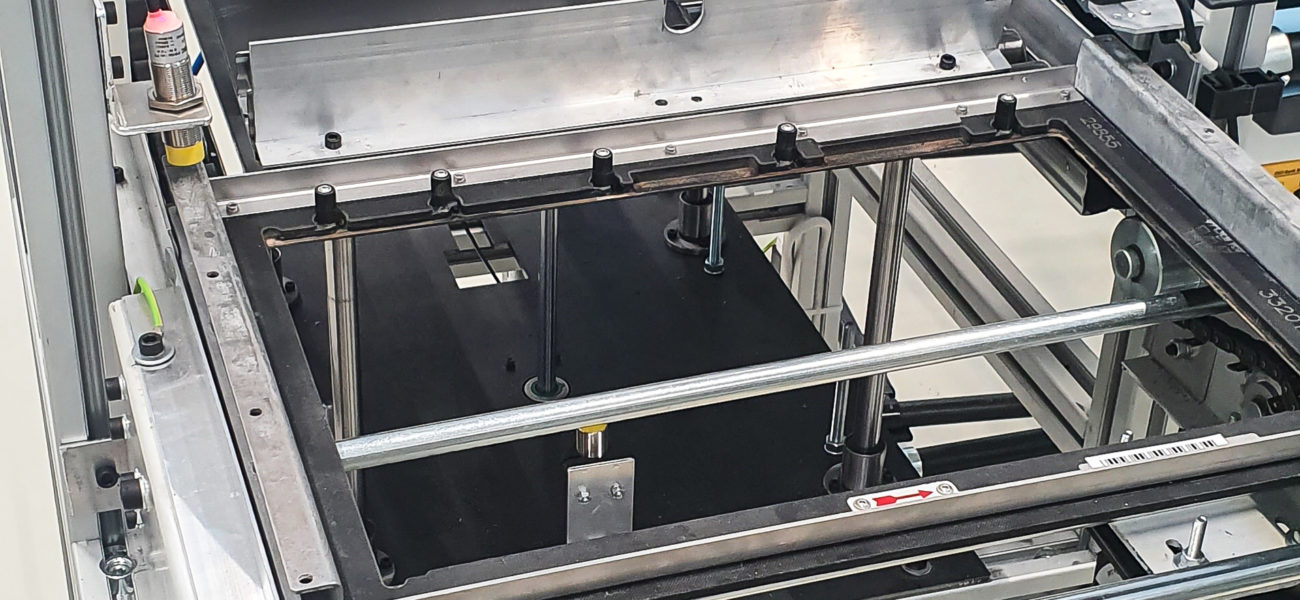
Proizvodnja ploča je neprekidni proces, a uređaji koji čine liniju za prenos rade u prekidnom režimu i to na sledeci način:
- ram sa napunjenim štampanim pločama se postavlja na prijemnu stanicu,
- spušta se na visinu transportera,
- mehanizam ga prenosi na transporter,
- transporter ga odnosi do sledećeg mehanizma sa barijerom, gde se senzornim prekidačem zaustavlja
- operater pritiskom na taster bira koju će od dve barijere spustiti, te se transporter nastavlja kretati
- na ulaz u kalajno kupatilo operater gura ram na sledeći trasportni mehanizam
Taj posao usklađivanja redosleda operacija obavlja upravljački sistem.
Sve operacije u toku transporta ploča do ulaza u kalajno kupatilo odvijaju se po unapred određenom programu.
Radom linije rukovodi operater.
Ploče dolaze istovremeno sa dve proizvodne linije, a operater određuje redosled kojim kreću ka kupatilu.
Konstrukcija za pozicioniranje ultrazvučnog zavarivača

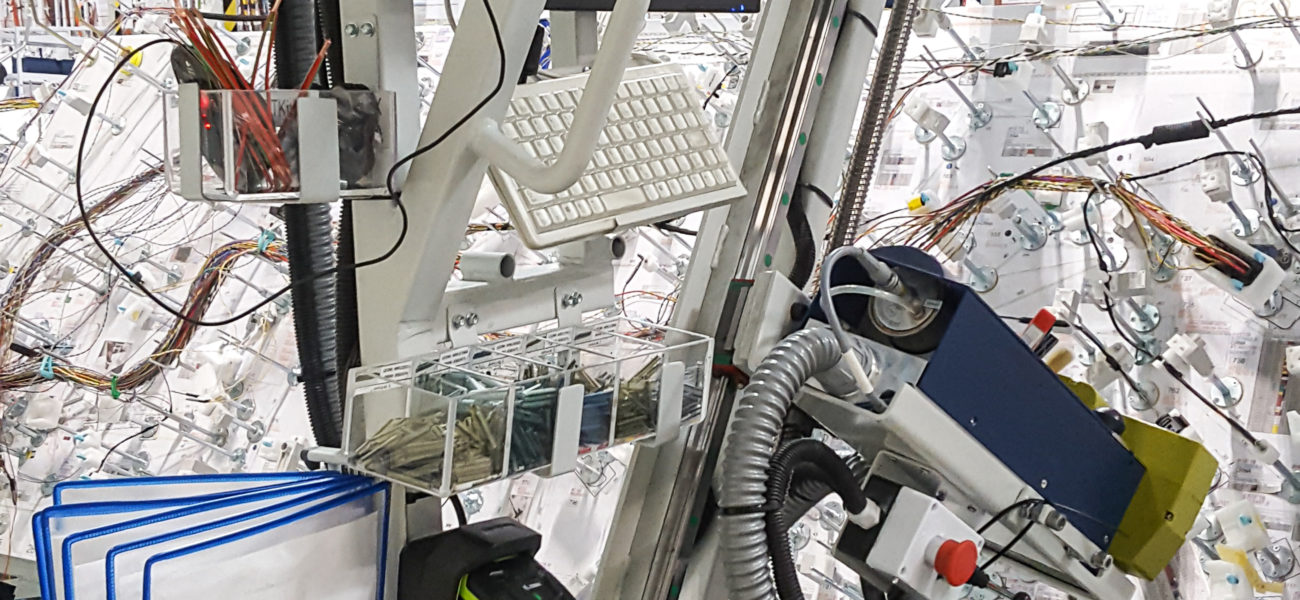












Prema zahtevu kupca, bilo je potrebno napraviti čeličnu konstrukciju koja će sa što manjim fizičkim naporom operatera moći da pozicionira ultrazvučni zavarivač kablova i to na opsegu koji je unapred definisan.
Konstrukcija je napravljena tako da operater može zavarivačem upravljati u tri ose.
U toku izrade kablovskih kompleta javlja se potreba za njihovim ultrazvučnim zavarivanjem, koji se izrađuju duž radne linije od 10-12 m. Linija se sastoji od niza radnih tabli, nagnutih pod određenim uglom. Mesto spajanja se određuje propisanim tehnološkim postupkom i zahvata celu površinu radne table. To znači da je zavarivač potrebno kretati u horizontalnoj i vertikalnoj – odnosno kosoj ravni paralelnoj sa radnom tablom.
Ova kretanja se ostvaruju pomoću različitih vrsta vođica, uglavnom kotrljajnih, a pogoni su ručni i elektromotorni.
Ručno se nosač kreće u horizontalnoj ravni u dve ose. Kretanjem po jednoj ide duž cele tehnološke linije, a kretanjem po drugoj, normalnog pravca na prvu, prilazi tabli do željenog mesta. Vertikalno kretanje se vrsi pomoću elektromotornog pogona.
U kosoj ravni, kretanje je definisano od donje ivice table do njenog vrha. Ovo kretanje se, takođe, obavlja pomoću elektromotornog pogona.
Konstrukcija se sastoji od:
- Čeličnih stubova,
- C profila po kojima se kreću klizači koji nose pokretnu platformu,
- Čeličnih kutija koje čine pokretnu platformu za koju je direktno povezan zavarivač i kompletna upravljačka elektronika.
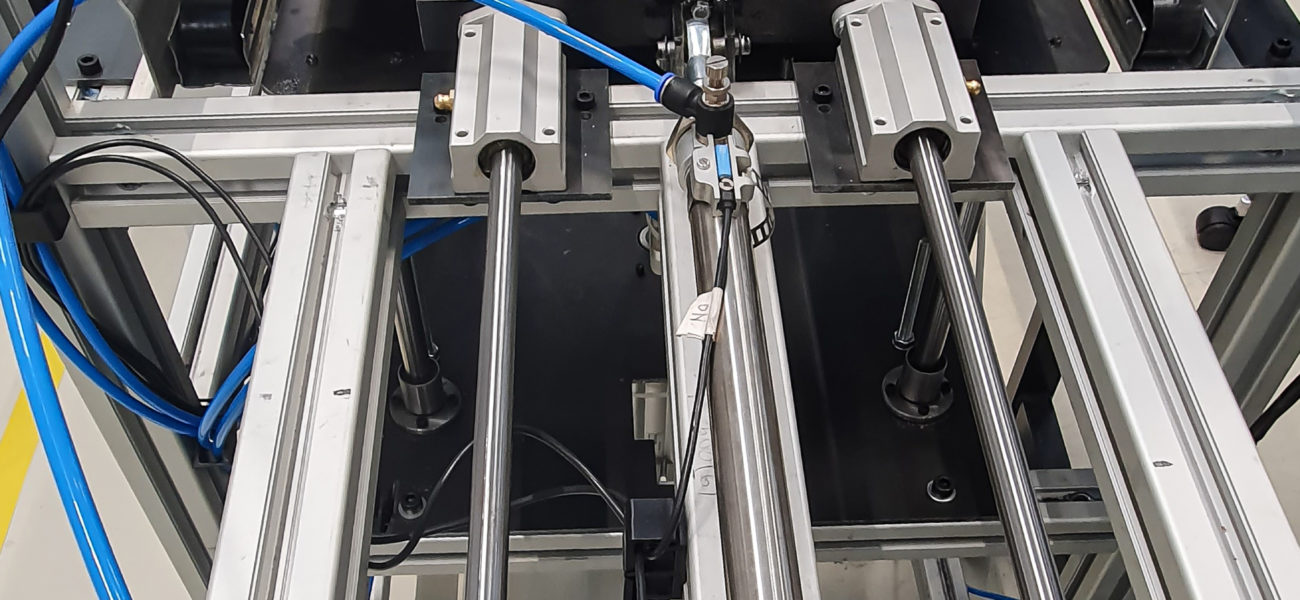
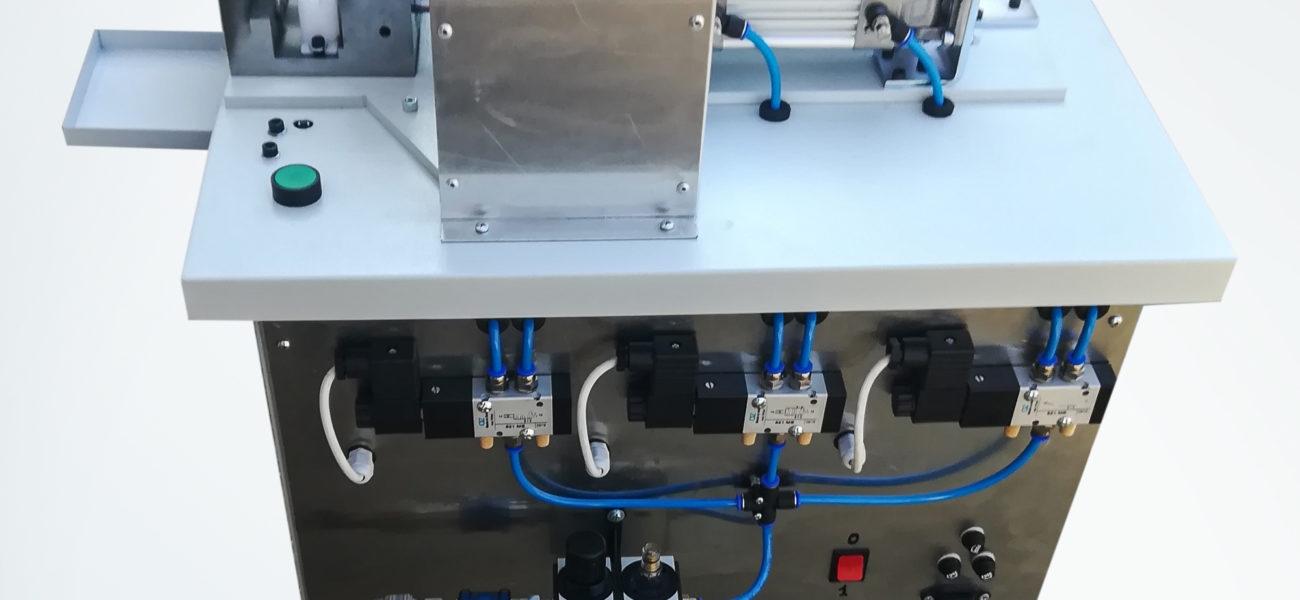
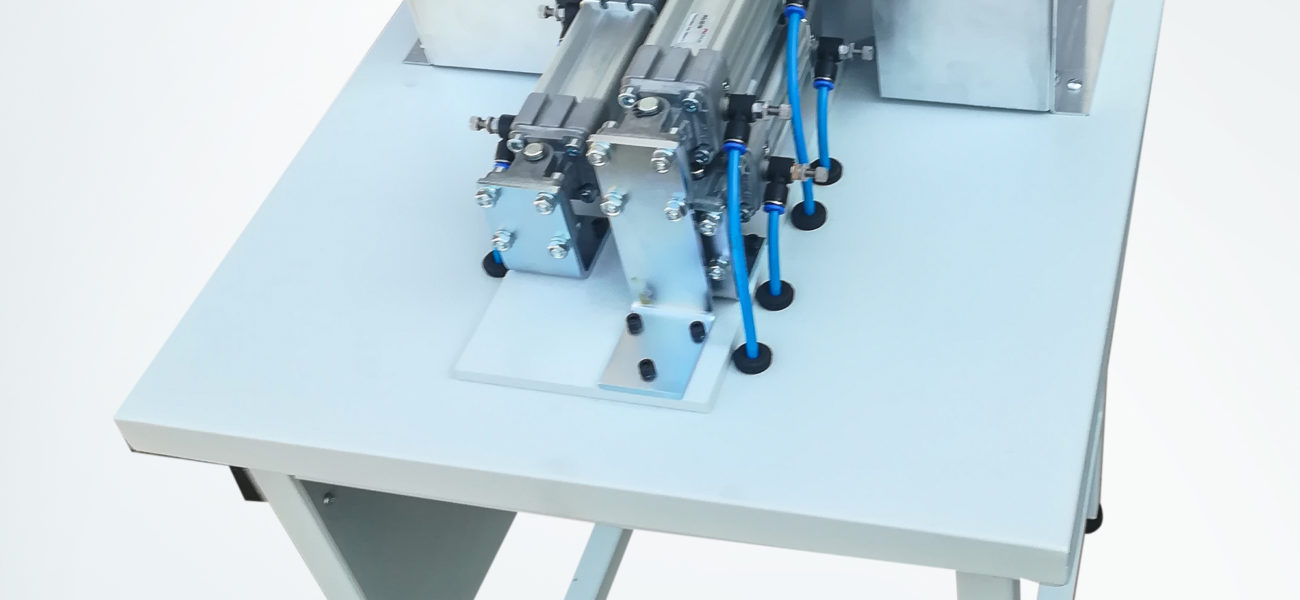
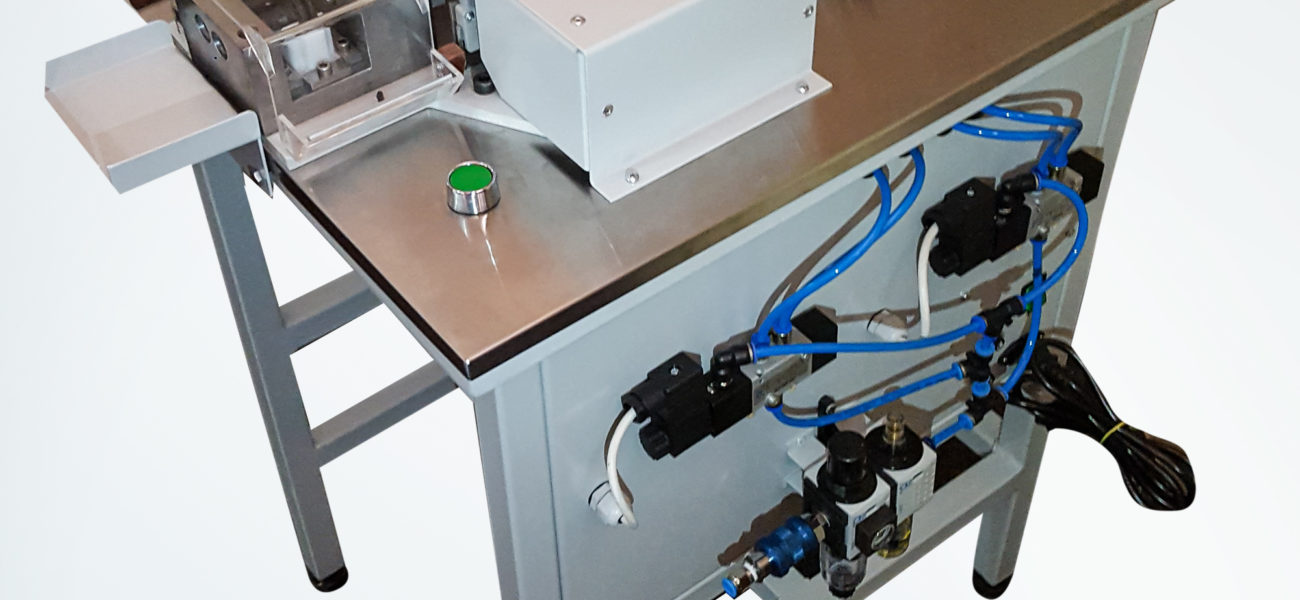
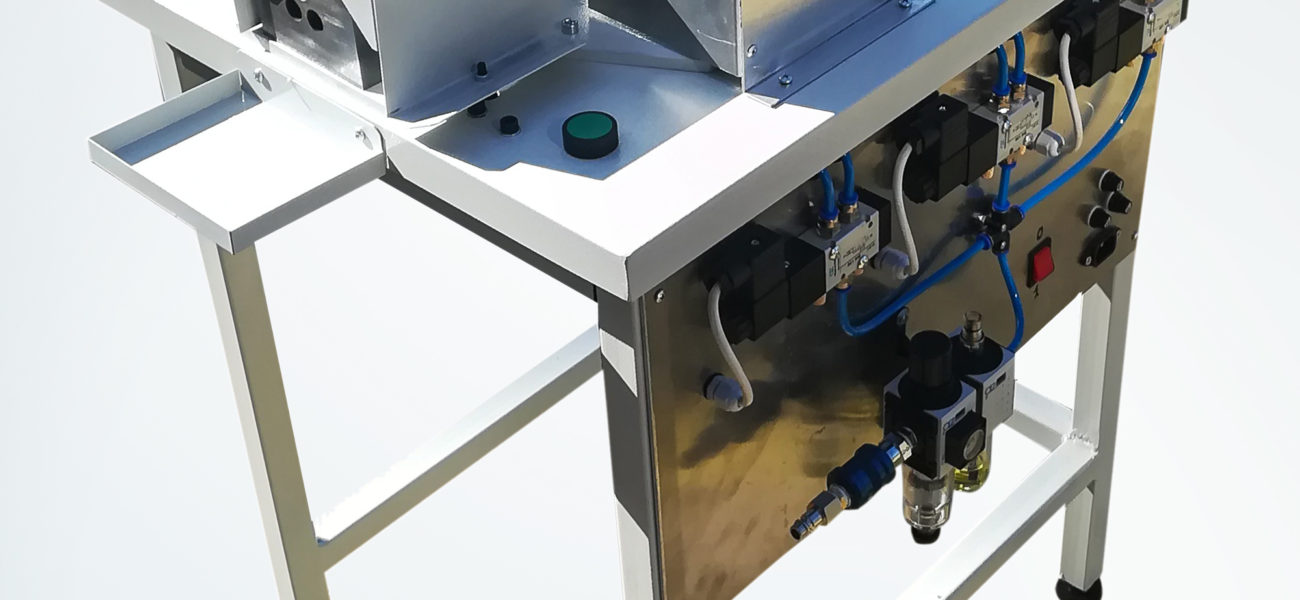
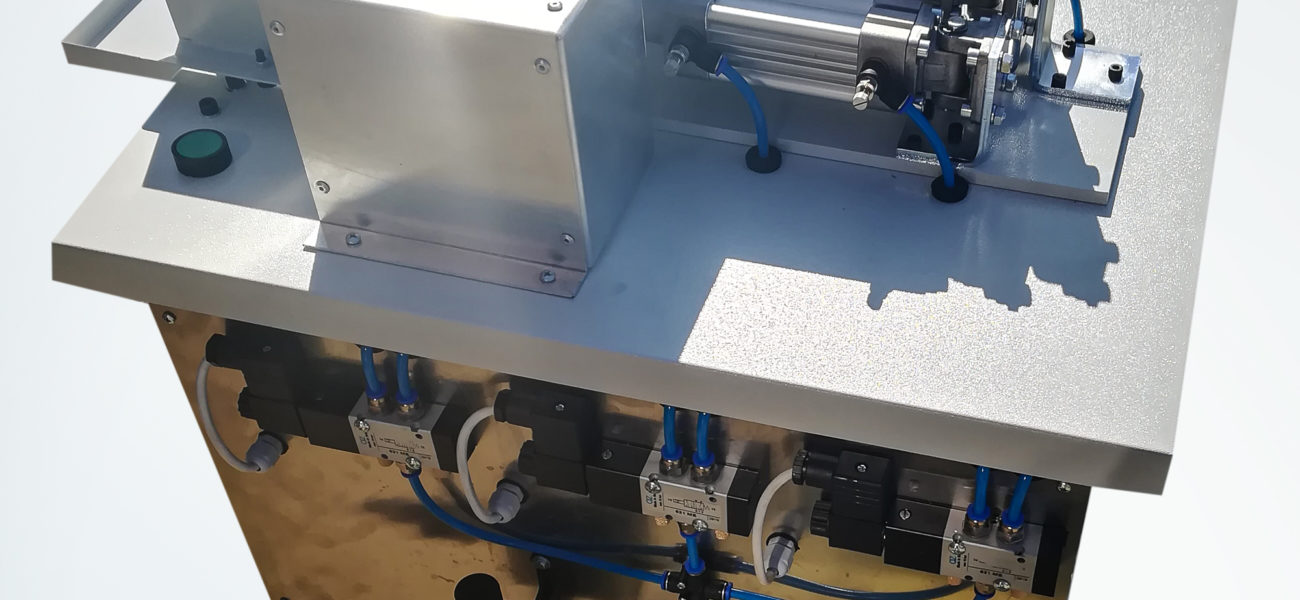
Uređaj za probijanje gumenih odlivaka – tile


Pri izradi gumenog dela livenjem pod pritiskom, na dva ili tri mesta gde je predviđeno da budu otvori za prolaz kablova i sl. , dva ili tri formirana kanala izlaze iz alata sa zatvorenim krajevima.
Potreba proizvodnje je da se krajevi uklone – probiju i to po želji prvi ili drugi, odnosno treći ili sva tri.
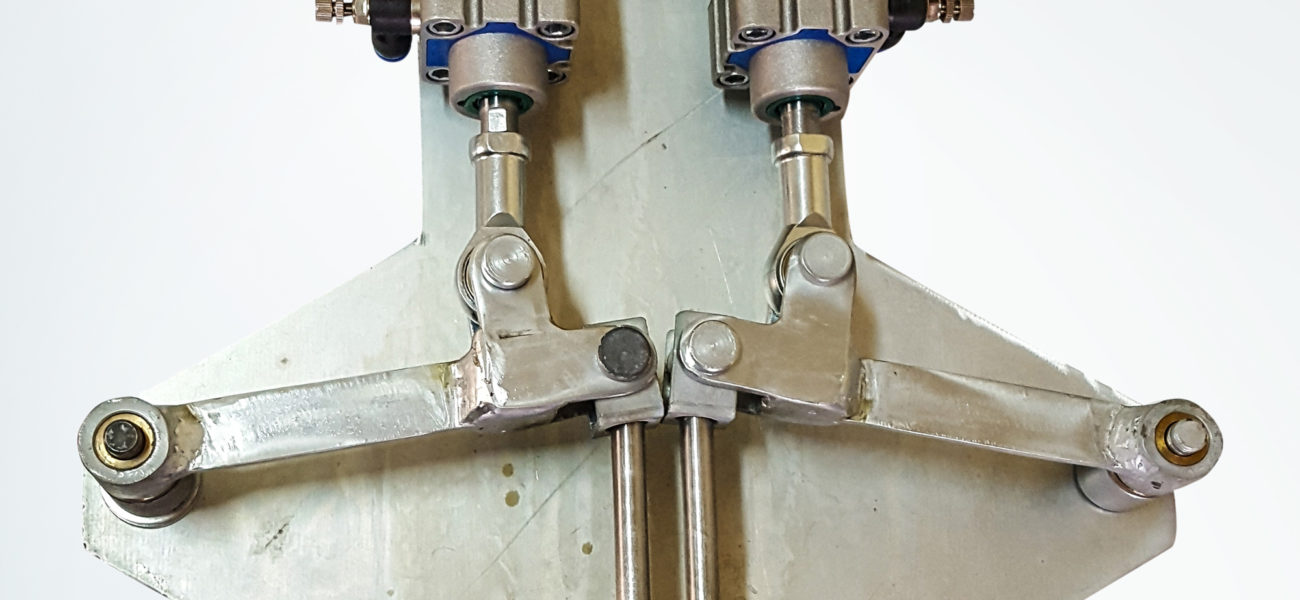
Glavni deo mašine je alat za probijanje. Sastoji se od kućišta u koje su ugrađena tri probijača i tri rezne čaure. Probijači se kreću kroz klizne vođice, prolaze kroz postavljeni gumeni odlivak i pri prolasku kroz rezne čaure probijaju otvore.
Probijači i rezne čaure su izrađeni od kvalitetnog alatnog čelika, okaljeni i izbrušeni.
Probijači se kreću napred-nazad dejstvom pneumatskih cilindara na posebno konstruisane poluge.
Pneumatskim cilindrima upravljaju elektromagnetni razvodnici sa elementima koji čine pneumatsku instalaciju.
Komande elektromagnetima razvodnika zadaju se preko tastera.
Radi zaštite korisnika od mogućih povreda, u radnoj zoni se nalazi poklopac koji zatvara prostor oko dela za bušenje.

